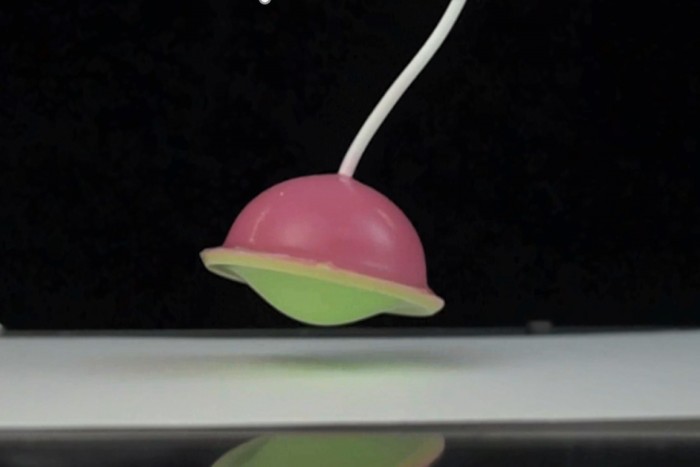
其中,大一点的在上面,小一点的在里面,在这两个软帽之间则有一个小小的气隙。
当不需要的时候,致动器只是平躺在地面上。然而当需要一个跳跃时,一个集成的软管会被用来向两个软帽之间的气隙泵入空气,由此产生的压力积聚从而使得更大的软帽向上膨胀。
但与此同时,较小的软帽会向下压并膨胀,此时,凹面向凸面快速释放能量。这一过程被称为壳体屈曲,它会让软帽用力撞击地面从而将整个致动器弹射到空中。
一旦跳跃完成,空气压力就会释放,软帽就会再次弹出回到致动器中。这意味着装备了这种装置的机器人可以重复跳跃。
该研究论文资深作者Katia Bertoldi教授指出:“这种执行器是一种构件,它可以集成到一个完全柔软的机器人系统中,从而让已经具备爬行、行走、游泳的软机器人获得跳跃的能力。通过将我们的跳跃者融入这些设计中,这些机器人可以在未知的环境中安全地航行。”
相关研究报告已发表在《Science Robotics》上。
